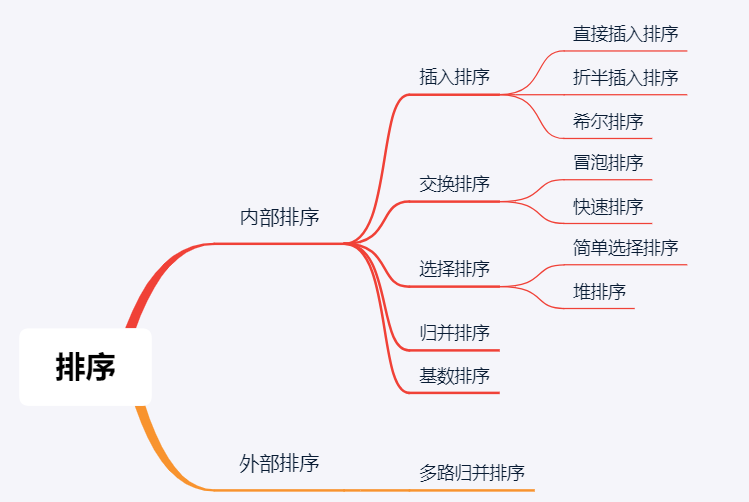
 排序
排序
参考文章:https://www.pdai.tech/md/algorithm/alg-sort-overview.html
# 一、插入排序
# 1. 直接插入排序(摸牌算法)
基本思想
把 n 个待排序的元素看成为一个有序序列和一个无序序列。开始时有序序列中只包含 1 个元素,无序序列中包含有 n-1 个元素,排序过程中每次从无序序列中取出第一个元素,将它插入到有序序列中的适当位置,使之成为新的有序序列,重复 n-1 次可完成排序过程。
实现
void insertSort(T A[], int n) {
for (int i = 1; i < n; i++) { // L[0]已经有序,从 L[1] 开始
if (A[i-1] <= A[i])
continue;
T temp = A[i]; // 刚摸到的牌
int j;
for (j = i - 1; j >= 0 && A[j] > temp; j--) { // 从后往前查找首个不大于temp的位置
A[j + 1] = A[j]; // 向后挪位
}
A[j + 1] = temp; // j 指向所找到的首个小于等于temp的,temp应放在其后
}
}
2
3
4
5
6
7
8
9
10
11
12
空间效率:O(1),仅使用了常数个辅助单元。
时间效率:O(n2)
稳定的排序算法
适应性:顺序存储和链式存储的线性表
# 2. 折半插入排序
基本思想
对直接插入排序做如下改进:查找有序子表时可以用折半查找来实现。待确定插入位置后,就可以统一地向后移动元素。
实现
void insertSort2(T A[], int n) {
int low, high, mid;
for (int i = 1; i < n; i++) {
T temp = A[i];
// 设置折半查找的范围
low = 0;
high = i - 1;
// 折半查找直到 low > high,此时 low = high + 1
// 应将 [low, i-1] 的元素全部右移
// 并将 temp 复制到 low 所指的位置
while (low <= high) {
mid = (low + high) / 2; // 取中间点
if (A[mid] > temp)
high = mid - 1; // 查找左半子表
else
low = mid + 1; // 查找右半子表
}
// 统一后挪元素,空出插入位置
for (int j = i - 1; j >= low; j--)
A[j + 1] = A[j];
A[low] = temp; // 插入操作
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
- 当
A[mid] == A[0]时,为了保证算法稳定性,应继续在 mid 所指位置右边寻找插入位置。这与折半查找有一点点区别,在折半查找中若“==”则直接命中。
时间复杂度:O(n2)
稳定的排序算法
# 3. 希尔排序
基本思想
希尔排序实质上是一种分组插入方法。它的基本思想是:对于n个待排序的数列,取一个小于n的整数gap(gap被称为步长)将待排序元素分成若干个组子序列,所有距离为gap的倍数的记录放在同一个组中;然后,对各组内的元素进行直接插入排序。 这一趟排序完成之后,每一个组的元素都是有序的。然后减小gap的值,并重复执行上述的分组和排序。重复这样的操作,当gap=1时,整个数列就是有序的。
实现
void shellSort(T A[], int n) {
T temp;
int j;
for (int gap = n / 2; gap >= 1; gap = gap / 2) { // 步长变化
// 每轮循环处理一对元素:i - gap 和 i
// 因为每个组中首元素都是有序的,所以处理一个组时从第二个元素开始
// 从 i = gap 开始,即从 A[0] 和 A[gap] 这一对元素开始
for (int i = gap; i < n; i++) {
if (A[i - gap] > A[i]) {
temp = A[i];
for (j = i - gap; j >= 0 && A[j] > temp; j -= gap) // 该组中前面的元素后移,同时查找待插入位置
A[j + gap] = A[j]; // 一个组中的元素后移
A[j + gap] = temp; // j 为首个小于等于temp的元素,在 j 后面的一个位置上插入
}
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
空间效率:O(1)
时间效率:依赖于增量序列的函数,难以分析其时间复杂度。当 n 在某个特定范围时,希尔排序的时间复杂度约为 O(n1.3),最坏情况下为 O(n2)。
不稳定的排序算法
适用性:仅适用于线性表为顺序存储的情况
# 二、交换排序
# 4. 冒泡排序
基本思想
它是一种较简单的排序算法。它会遍历若干次要排序的数列,每次遍历时,它都会从前往后依次的比较相邻两个数的大小;如果前者比后者大,则交换它们的位置。这样,一次遍历之后,最大的元素就在数列的末尾! 采用相同的方法再次遍历时,第二大的元素就被排列在最大元素之前。重复此操作,直到整个数列都有序为止。
实现
void bubbleSort(T A[], int n) {
bool sorted = false; // 整体排序标志,首先假定尚未排序
while (!sorted) { // 在尚未确认已经全局排序之前,逐趟进行扫描交换
sorted = true; // 假定已经排序
for (int i = 1; i < n; i++) { // 自左向右逐对检查当前范围A[0,n)内的各相邻元素
if (A[i - 1] > A[i]) { // 一旦A[i-1]与A[i]逆序,则
swap (A[i - 1], A[i]); // 交换之,并
sorted = false; // 因整体排序不能保证,需要清除排序标志
}
} // end for
n--; // 至此末元素必然就位,故可以缩短待排序序列的有效长度
}
}
2
3
4
5
6
7
8
9
10
11
12
13
空间效率:O(1) 时间效率:O(n2)
稳定的排序算法
适用性:数组、链表
# 5. 快速排序
基本思想
选择一个基准数,通过一趟排序将要排序的数据分割成独立的两部分;其中一部分的所有数据都比另外一部分的所有数据都要小。然后,再按此方法对这两部分数据分别进行快速排序,整个排序过程可以递归进行,以此达到整个数据变成有序序列。
过程:
从数列中挑出一个基准值。
将所有比基准值小的摆放在基准前面,所有比基准值大的摆在基准的后面(相同的数可以到任一边);在这个分区退出之后,该基准就处于数列的中间位置。
递归地把"基准值前面的子数列"和"基准值后面的子数列"进行排序。
实现
/**
* 对 A[low, high] 进行快排
*/
void qsort(T A[], int low, int high) {
if (low < high) { // 递归跳出的条件
int mid = partition(A, low, high); // 划分得到基准
// 依次对两个子表进行递归排序
qsort(A, low, mid - 1);
qsort(A, mid + 1, high);
}
}
/**
* 一趟划分
*/
int partition(T A[], int low, int high) {
T pivot = A[low]; // 将当前表中的第一个元素设为枢轴,对表进行划分
while (low < high) { // 循环跳出条件
while (low < high && A[high] >= pivot)
high--; // 将比枢轴小的元素移动到左端(low左边都是比枢轴小的元素)
A[low] = A[high];
while (low < high && A[low] < pivot)
low++; // 将比枢轴大的元素移动到有段(high右边都是比枢轴大的元素)
A[high] = A[low];
}
A[low] = pivot; // 枢轴元素放到最终位置
return low; // 返回存放枢轴的最终位置
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
空间效率:由于快排是递归的,需要借助一个递归栈,其容量应与递归调用的最大深度一致。最好情况下 O(log2n),最坏情况下 O(n),平均情况下 O(log2n)
时间效率:与划分是否对称有关。最坏时 O(n2),平均 O(n * log2n)。
不稳定的排序算法
# 三、选择排序
# 6. 简单选择排序
基本思想
首先在未排序的数列中找到最小(or最大)元素,然后将其存放到数列的起始位置;接着,再从剩余未排序的元素中继续寻找最小(or最大)元素,然后放到已排序序列的末尾。以此类推,直到所有元素均排序完毕。
实现
void selectSort(T A[], int n) {
for (int i = 0; i < n - 1; i++) { // 一共进行 n-1 趟
int min = i; // 记录最小元素位置
// 在A[i...n-1]中选择最小的元素
for (int j = i + 1; j < n; j++) {
if (A[j] < A[min])
min = j;
}
if (min != i)
swap(A[i], A[min]);
}
}
2
3
4
5
6
7
8
9
10
11
12
- 每一趟排序可以确定一个元素的最终位置。在每一趟中在待排序元素中选取关键字最小的元素加入有序子序列。
空间效率:O(1) 时间效率:O(n2)
不稳定的排序算法
# 7. 堆排序
# 堆定义
n 个关键字序列 L[1...n] 称为堆,当且仅当该序列满足:
① L(i) >= L(2i) 且 L(i) >= L(2i + 1) 或 ——> 大根堆(大顶堆):根 ≥ 左右
② L(i) <= L(2i) 且 L(i) <= L(2i + 1) ——> 小根堆(小顶堆):根 ≤ 左右
其中 1 ≤ i ≤ └ n/2 ┘
在第一个元素的索引为 0 的情形中:
- 索引为i的左孩子的索引是 (2i+1);
- 索引为i的右孩子的索引是 (2i+2);
# 堆排序
最大堆进行升序排序的基本思想:
- 初始化堆: 将数列a[1...n]构造成大根堆。
- 交换数据: 将a[1]和a[n]交换,使a[n]是a[1...n]中的最大值;然后将a[1...n-1]重新调整为最大堆。 接着,将a[1]和a[n-1]交换,使a[n-1]是a[1...n-1]中的最大值;然后将a[1...n-2]重新调整为最大值。 依次类推,直到整个数列都是有序的。
实现
- 建立大根堆
在堆排序算法中,首先要将待排序的数组转化成二叉堆。n 个结点的完全二叉树,最后一个结点是第  个结点的孩子。对第
个结点的孩子。对第 个结点为根的子树筛选(对于大根堆,若根节点的关键字小于左右孩子中关键字较大者,则交换),使该子树成为堆。之后向前依次对各节点(
个结点为根的子树筛选(对于大根堆,若根节点的关键字小于左右孩子中关键字较大者,则交换),使该子树成为堆。之后向前依次对各节点( )为根的子树进行筛选,看各结点值是否大于其左右子结点的值,若不大于,则将左右子结点中的较大者与之交换,交换后可能会破坏下一级的堆,于是继续采用上述方法构造下一级的堆,直到以该结点为根的子树构成堆为止。反复利用上述调整堆的方法建堆,直到根结点。
)为根的子树进行筛选,看各结点值是否大于其左右子结点的值,若不大于,则将左右子结点中的较大者与之交换,交换后可能会破坏下一级的堆,于是继续采用上述方法构造下一级的堆,直到以该结点为根的子树构成堆为止。反复利用上述调整堆的方法建堆,直到根结点。
/**
* 此处数组 A[0] 空出来
* 首元素从 A[1] 开始,共n个元素, 则为 A[1..n]
*/
void buildMaxHeap(T A[], int n) {
for (int i = n / 2; i > 0; i--) {
heapAdjust(A, i, n);
}
}
/**
* heapAdjust 将元素 k 为根的子树进行调整,使之成为大根堆
* 调整的过程就是不断下坠直到找到一个位置能够存放原 A[k] 处的 rootVal
* A[1...len] 为元素
* len:堆中关键字个数
*/
void heapAdjust(T A[], int k, int len) {
T rootVal = A[k]; // 暂存子树的根节点值
// 寻找能够存放 rootVal 的位置
// i 指向 k 的左孩子
// 每一轮中 i 都是指向 k 的左孩子
for (i = 2 * k; i <= len; i = k * 2) {
// 比较左右孩子使 i 指向较大的孩子
// 先判断 i < len 是为了防止没有右孩子
if (i < len && A[i] < A[i + 1])
i++;
if (rootVal >= A[i])
break; // 筛选结束
else { // 需要调整
A[k] = A[i]; // 将 A[i]调整到父节点上
k = i; // 修改 k 值使之指向下一级的root,以便继续向下筛选,每轮下沉一次直到找到一个能够存放 rootVal 的位置
}
}
A[k] = rootVal; // 通过上面的循环让 k 不断下沉,终于找到了一个能够存放 rootVal 的位置
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
- 交换数据
在将数组转换成最大堆之后,接着要进行交换数据,从而使数组成为一个真正的有序数组。
最终的排序:
void heapSort(T A[], int n) {
buildMaxHeap(A, n); // 初始化堆
// n-1 趟交换和建堆过程
for (i = n; i > 1; i--) { // i 指向当前待排序元素序列中的最后一个(堆底元素)
swap(A[i], A[1]); // 交换数据(堆顶和堆底交换),一个元素就位
heapAdjust(A, 1, i - 1);// 调整,把剩余 i-1 个元素整理成堆
}
}
2
3
4
5
6
7
8
空间效率:O(1)
时间效率:O(n * log2n) :建堆时间 O(n),之后有 n-1 次向下调整操作,每次调整 O(h)
不稳定的排序算法
# 四、归并排序和基数排序
# 8. 归并排序
基本思想
基本包括3步:
分解 -- 将当前区间一分为二,即求分裂点
mid = (low + high) / 2;求解 -- 递归地对两个子区间 a[low...mid] 和 a[mid+1...high] 进行归并排序。递归的终结条件是子区间长度为1。
合并 -- 将已排序的两个子区间 a[low...mid] 和 a[mid+1...high]归并为一个有序的区间a[low...high]。
实现
T[] aux = new T[MAXSIZE]; // 辅助数组
/**
* 表 A 的两段 A[low...mid] 和 A[mid+1...high] 各自有序,将它们合并成一个有序表
*/
void merge(T A[], int lo, int mid, int hi) {
// 将 A[lo..hi] 复制到 aux[lo..hi]
for (int k = lo; k <= hi; k++) {
aux[k] = A[k];
}
int i = lo, j = mid + 1; // i 指左边,j 指右边
for (int k = lo; k <= hi; k++) { // 归并回到 A[lo..hi]
if (i > mid) A[k] = aux[j++]; // 左半边用尽(取右半边)
else if (j > hi) A[k] = aux[i++]; // 右半边用尽(取左半边)
else if (aux[i] > aux[j]) A[k] = aux[j++]; // 左 > 右
else A[k] = aux[i++]; // 右 >= 左
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
- 该方法先将所有元素复制到 aux[] 中,然后再归并回 a[] 中。方法在归并时(第二个 for 循环)进行了 4 个条件判断: 左半边用尽(取右半边的元素)、右半边用尽(取左半边的元素)、右半边的当前元素小于左半边的当前元素(取右半边的元素)以及右半边的当前元素大于等于左半边的当前元素(取左半边的元素)。
/**
* 将 A[lo..hi] 排序
*/
void mergeSort(T A[], int lo, int hi) {
if (lo >= hi) return;
int mid = lo + (hi - lo) / 2;
mergeSort(A, lo, mid); // 将左半边排序
mergeSort(A, mid + 1, hi); // 将右半边排序
merge(A, lo, mid, hi); // 归并结果
}
2
3
4
5
6
7
8
9
10
空间效率:O(n) 时间效率:O(n * log2n)
稳定的排序算法