 Y86-64 的顺序实现
Y86-64 的顺序实现
# 4.3 Y86-64 的顺序实现
# 4.3.1 将处理组织成阶段
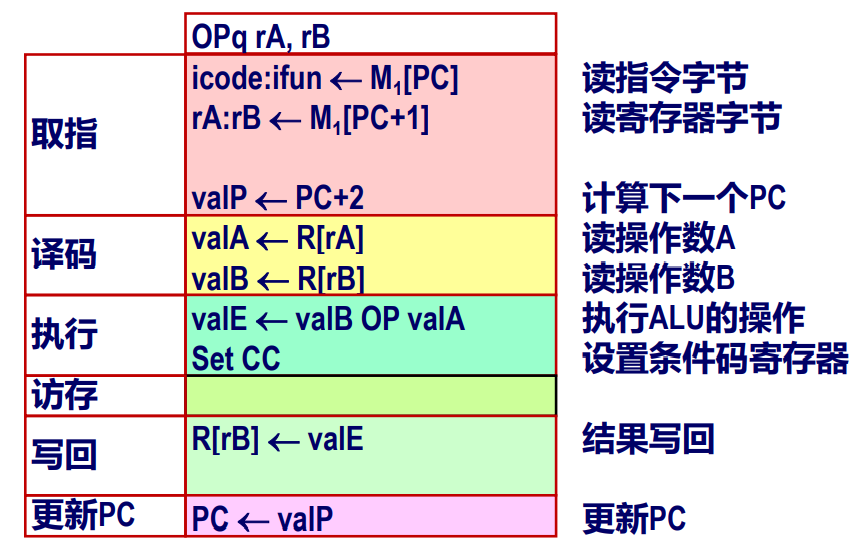
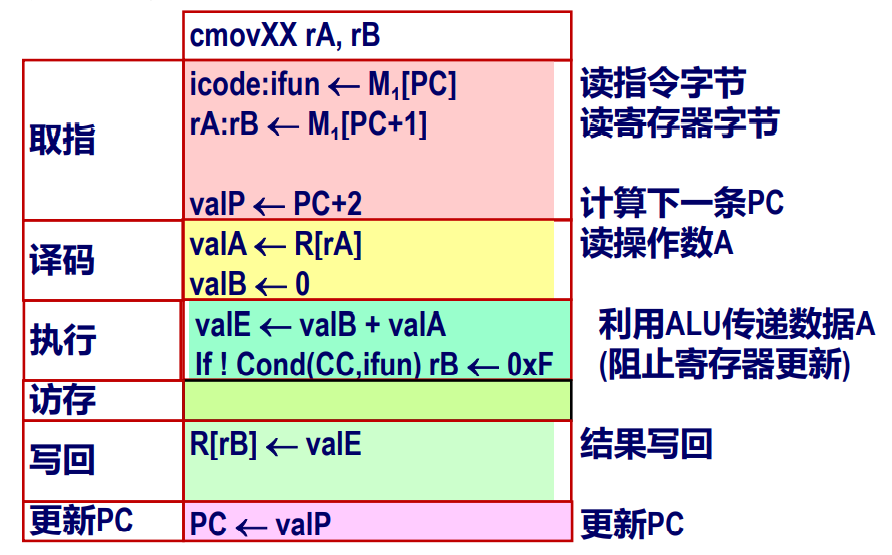
- 取指(fetch):从内存中读取地址为 PC 的指令字节。valP = PC + 指令长度。
- 译码(decode):从寄存器文件读入最多两个操作数,得到 valA、valB。通常是读入指令 rA 和 rB 字段指明的寄存器,不过也有些指令是读 %rsp 的。
- 执行(execute):ALU 要么执行指令指明的操作(根据 ifun),计算内存引用的有效地址,要么增加或减小栈指针。得到的值称为 valE。在此也有可能设置条件码,这个阶段会决定是否应该选择分支。
- 访存(memory):读写内存,读出的值为 valM。
- 写回(write back):最多可以写两个结果到寄存器文件。
- 更新 PC(PC update):将 PC 设置为下一条指令的地址。
# 计算中各数值的含义
取指:
| 名称 | 含义 |
|---|---|
| icode | 指令码 |
| ifun | 指令功能 |
| rA、rB | 指令寄存器 A、B |
| valC | 指令中的常数 |
译码:
| 名称 | 含义 |
|---|---|
| srcA、srcB | 寄存器 ID A、B |
| dstE、dstM | 目的寄存器 E、M |
| valA、valB | 寄存器值 A、B |
执行:
| 名称 | 含义 |
|---|---|
| valE | ALU 运算结果 |
| cnd | 分支或转移标识 |
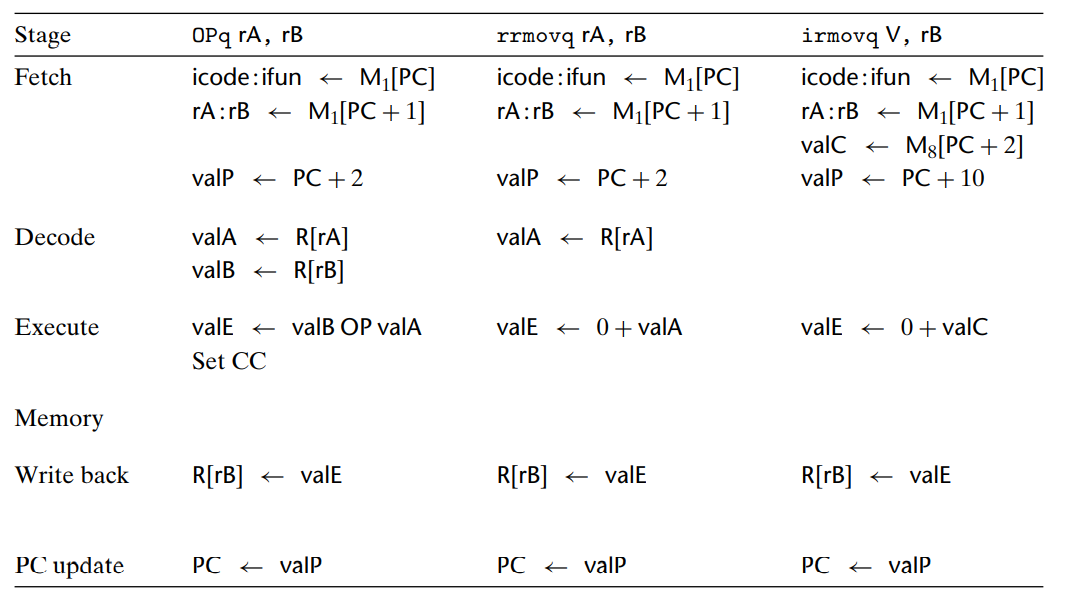
# Arith/Log. Opq
# rrmovq 和 irmovq
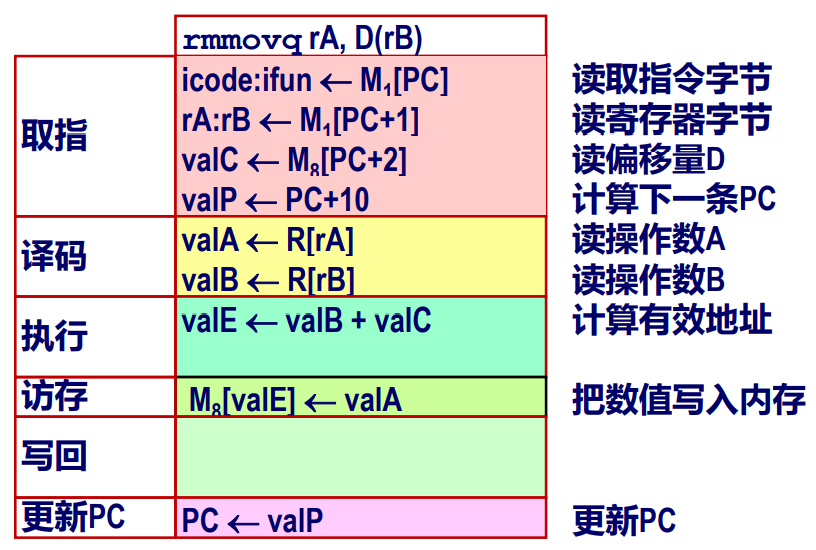
# rmmovq
# mrmovq
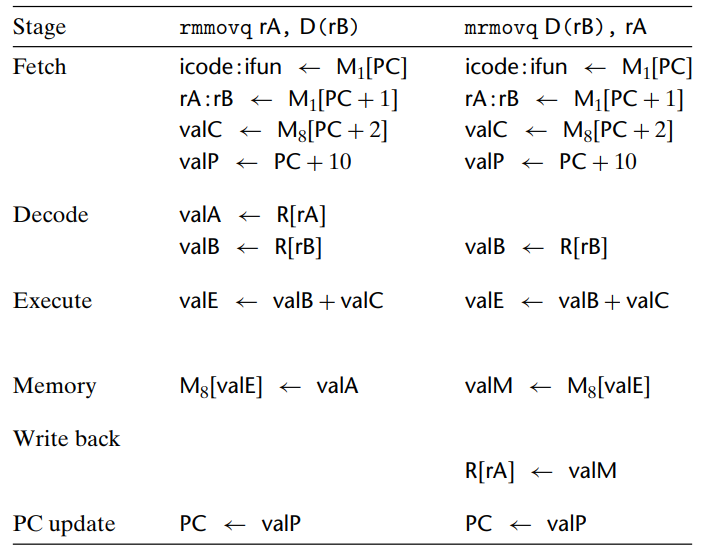
- 注意
mrmovq D(rB), rA指令的写法中 rA、rB 所在的先后顺序与指令编码中是相反的。
# pushq、popq
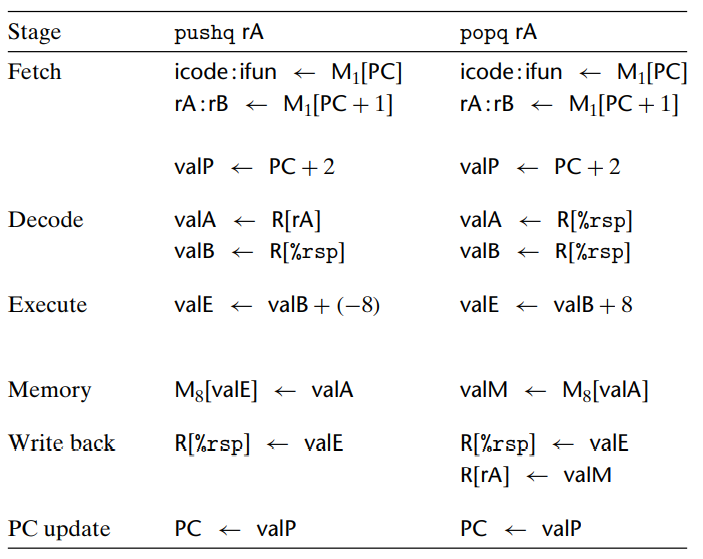
pushq应该先将栈指针减去 8,即使栈指针的更新实际上是在内存操作完成后才进行的。pop应该首先读内存,然后再增加栈指针。
# jumps
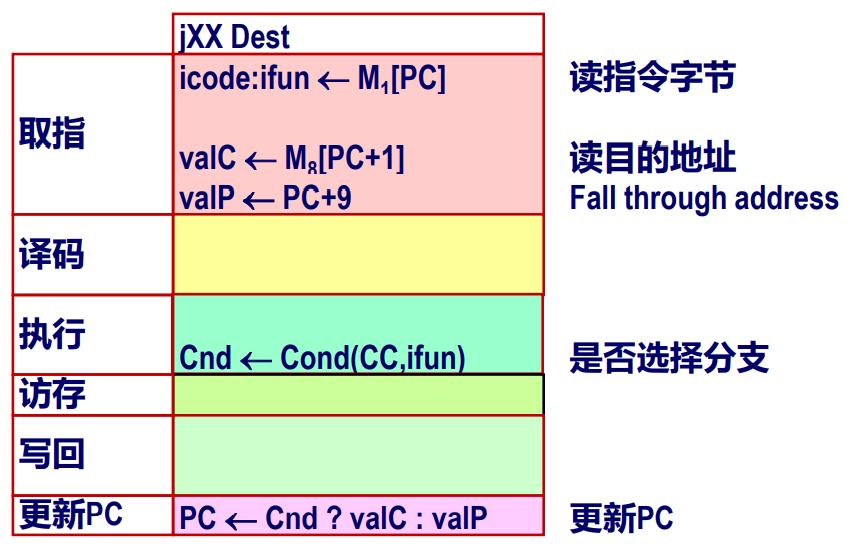
- 跳转的实现:在执行阶段,检查条件码和跳转条件来确定是否要选择分支,产生一个一位信号 Cnd。在更新 PC 阶段,检查这个标志,如果这个标志为 1,就将 PC 设为 valC(跳转目标),如果为 0,就设为 valP(下一条指令的地址)。
# call
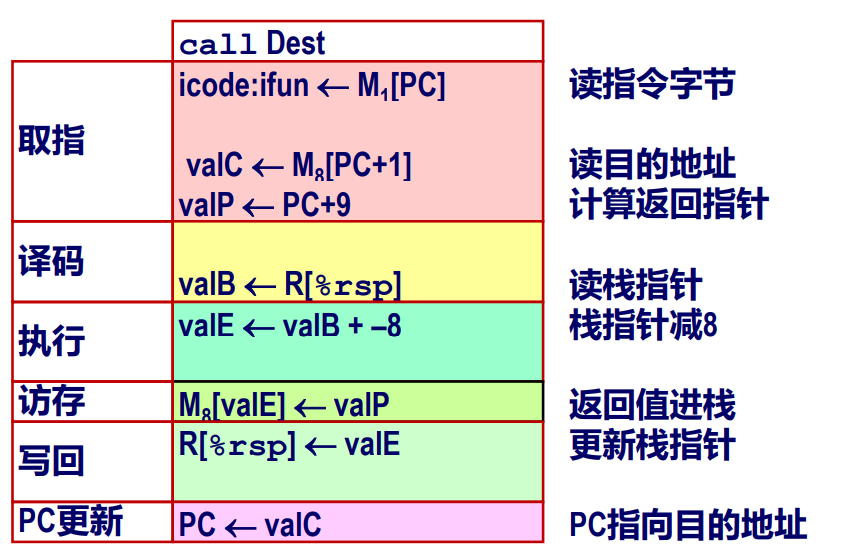
- 对指令 call,我们要将 valP,也就是 call 指令后紧跟着的那条指令的地址,压入栈中。在更新 PC 阶段,将 PC 设为 valC,也就是调用的目的地。
# ret
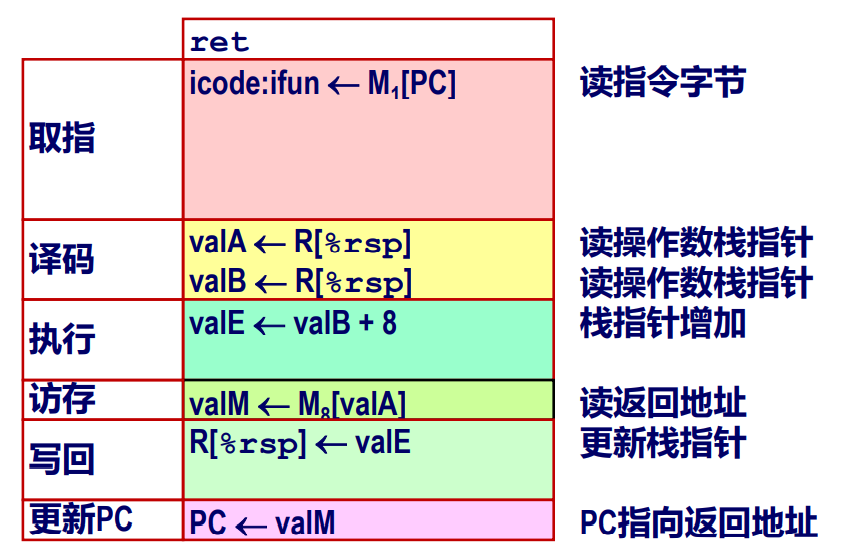
- 对指令 ret,在更新 PC 阶段,我们将 valM,即从栈中取出的值,赋值给 PC。
# Conditional Move
# 4.3.2 SEQ 的硬件结构
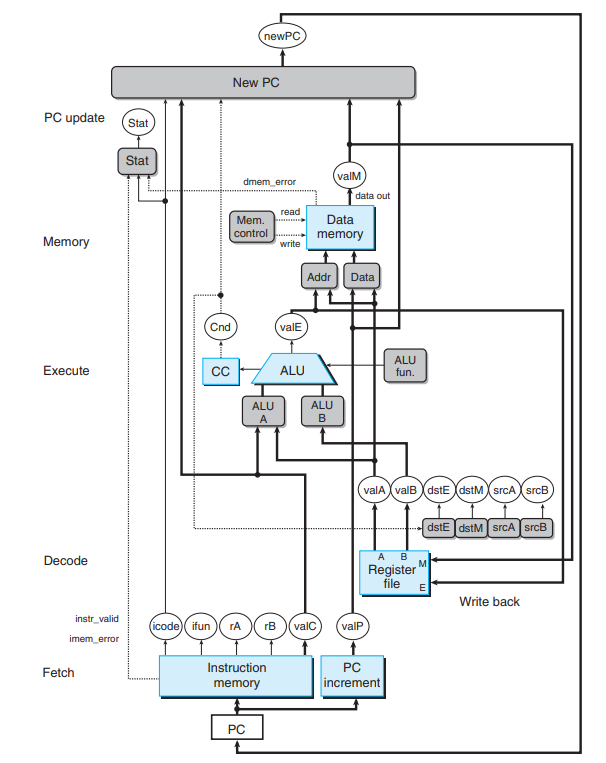
图片说明
- 浅蓝色方框:硬件单元,如内存、ALU 等
- 灰色方框:控制逻辑,用 HCL 描述
- 白色椭圆框:信号标识
- 粗线:宽度为字长的数据(64位)
- 细线:宽度为字节或更窄的数据(4-8位)
- 虚线:单个位的数据
# (1)取指阶段
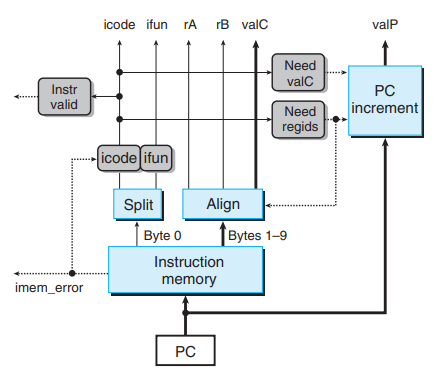
预定义的单元:
- PC:存储 PC 的寄存器
- 指令内存:读出 10 个字节(PC ~ PC+9),发出指令地址不合法的信号(imem_error)
- Split:把指令字节分为 icode 和 ifun
- Align:把读出的字节放入寄存器和常数字(valC)中
控制逻辑:
- instr_valid:指令是否有效?
- icode、ifun:指令地址无效时(检查 imem_error 信号)生成 no-op 指令;有效时是指令的相应字段
- need_regids:指令是否有寄存器字节?
- need_valC:指令中是否有常数字?
# (2)译码和写回阶段
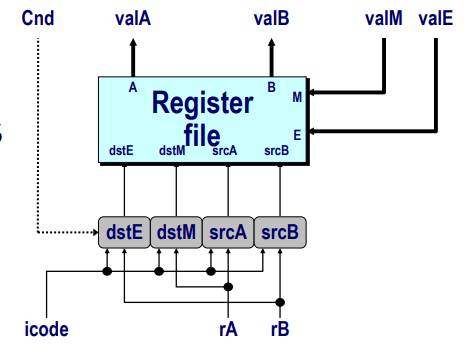
寄存器文件:
- 读端口 A, B
- 写端口 E, M
- 地址为寄存器 ID 或者是 15(0xF),15 时无法访问
控制逻辑:
- srcA, srcB: 读端口地址
- dstE, dstM: 写端口地址
信号:
- Cnd: 标明是否触发条件转移。在执行阶段计算出Cnd条件信号。
# (3)执行阶段
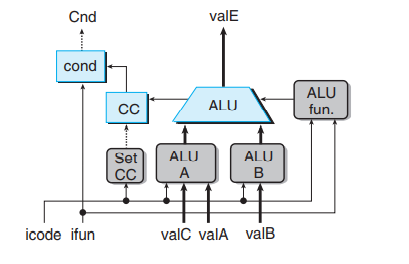
单元:
- ALU:实现四种所需的功能;生成条件码
- CC:包含三个条件码的寄存器
- cond:计算条件转移或跳转标识
控制逻辑:
- Set CC:是否加载条件码寄存器?
- ALU A:数据 A 送入 ALU
- ALU fun:ALU 执行哪个功能
# (4)访存阶段
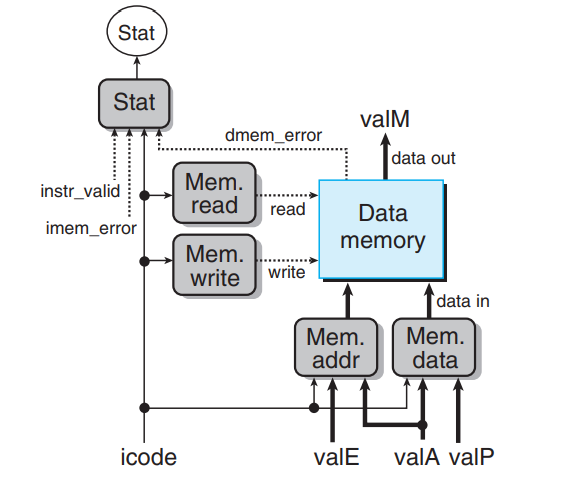
控制逻辑:
- stat:指令的状态是什么
- Mem.read:是否读数据字
- Mem.write:是否写数据字
- Mem.addr:选择地址
- Mem.data:选择数据
# (5)更新 PC 阶段
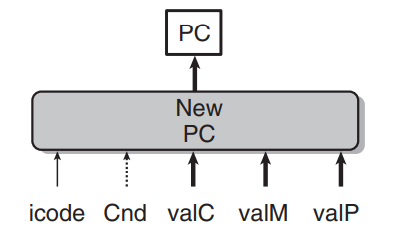
- 新 PC:选取下一个 PC 的值
编辑 (opens new window)
上次更新: 2021/11/14, 12:36:40