 感知机
感知机
# 1. 初识感知机
在前面,我们知道学习方法的三要素为模型、策略、算法。这一节,我们就讲一下感知机的模型以及相应的策略。
# 1.1 Perceptron 简介
感知机是一个二分类的线性分类模型,之所以说是线性,是因为它的模型是线性形式的。
# 1.1.1 概念
下面我们分别从输入空间、输出空间、模型结构、参数空间和假设空间来看一下感知机:
Input:
- input space:
- input:
Output:
- output space:
- output:
output 代表实例 x 所对应的类别,+1 代表正类,-1 代表负类。
现在我们定义一个从 input space 到 output space 的函数,这个函数就称作 perceptron:

其中
特征空间里面所有可能的这种线性函数就称为假设空间:
参数
# 1.1.2 几何含义
下面我们从几何角度来解释一下感知器。
刚刚那个线性方程
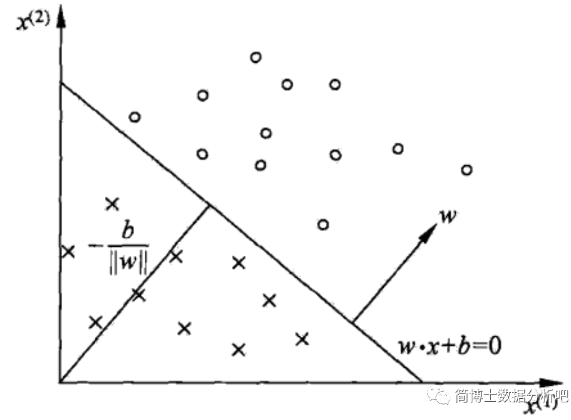
通过 hyperplane
补充一下 hyperplane 的含义,在几何中,如果环境空间是 n 维的,那么它所对应的 hyperplane 其实就是一个 n-1 维的子空间。换句话说,hyperplane 是比它所处的环境空间小一个维度的子空间。
# 1.2 学习策略
再来看 perceptron 的第二个要素:学习策略。
perceptron 有一个比较严苛的条件,就是要求数据集必须是线性可分的。什么是线性可分:
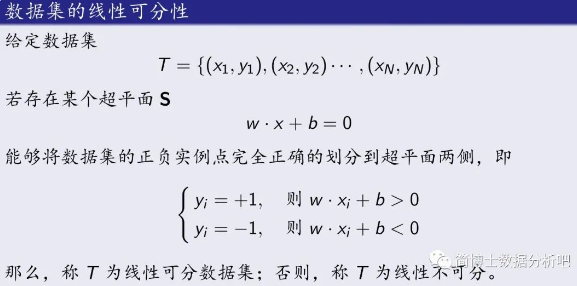
通俗的说,对于给定的数据集,如果存在某个 hyperplane,使得这个数据集的所有实例点可以完全划分到hyperplane 的两侧,也就是正类和负类,我们就称这个数据集是线性可分的,否则线性不可分。
如果想要找到能够分开数据集的 hyperplane,就需要确定 model 的 params,这就需要制定一定的学习策略。换而言之,就是要合理地定义感知机相应的损失函数。
首先,我们给出 feature space 中任意一点到 hyperplane 的距离:
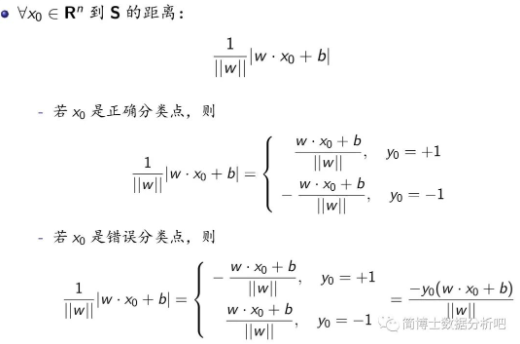
现在我们要关注的就是这里的错误分类点。错误分类点
很明显,M 中所含有的误分类点越少的时候,总距离和应该越小。在没有误分类点时这个距离和应该是 0。所以,我们可以通过最小化总距离和来求得相应的参数。这时候我们可以简化为最小化下面这个损失函数来实现:
这里
不是一个固定的值,损失函数里为什么可以去掉它了?主要考虑两个方面:
不会影响距离和的符号,即不影响正值还是负值的判断 不会影响感知器算法的最终结果。算法终止条件,是不存在误分类点。这时候 M 为空集,那么误分类点的距离和是否为 0 取决于分子,而不是分母,因此与
的大小无关
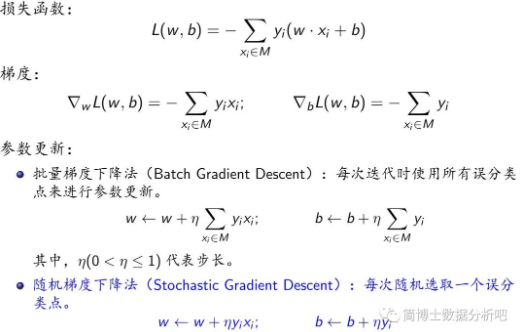
# 2. 优化算法的扛把子之一:梯度下降法
优化算法有很多,最常用的当属梯度下降法和牛顿法。本节先看一下梯度下降法。
# 2.1 概念与算法
现在,假设有一个可导的函数,我们想找到该函数的极小值,也就是相当于,找一下这座山的山底位置。这个下山过程,对于函数来说就是每次找到该定点相应的梯度,然后沿着梯度的反方向往下走,这就是使函数值下降最快的方向了。
梯度既有方向又有大小,是个矢量。梯度指某一函数在该点处最大的方向导数,沿着该方向可取得最大的变化率:
可见,梯度的方向就是函数在该点处最陡的方向,大小就是在该方向取得的最大变化率,这里最大的变化率也可以称作梯度的模。
下面就是看看如何利用梯度下山。若
这是一个迭代公式,
假如终止条件为
这里的
代表范数,本期内容计算对象都是一个数值,所以取的是 L1 范数,如果计算对象是向量,不妨取 L2 范数代表距离,也可以取 范数,代表取最大值。
下面我们给出梯度下降法的详细算法:

上述算法终止条件的含义是,两次迭代所得函数值十分接近,就说明参数已收敛到函数极小值处了。这里的终止条件也可以换成其他的,只要合理即可。
# 2.2 最速下降法
// TODO
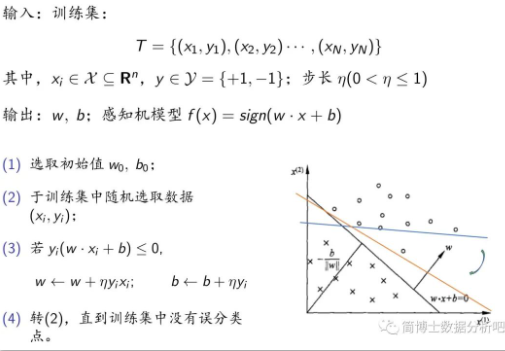
# 3. 感知机算法 - 原始形式
感知机的算法,通常来说有两种,一个是原始形式的,一个是对偶形式的,本节我们聚焦到原始形式的算法上。
学习的问题表述如下:
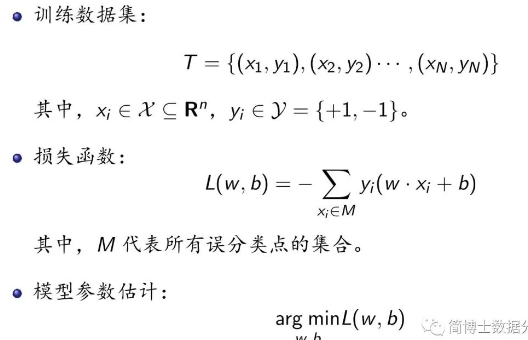
如何求参数
这里我们选取随机梯度下降法进行迭代优化计算(注意每次是选取一个误分类点):
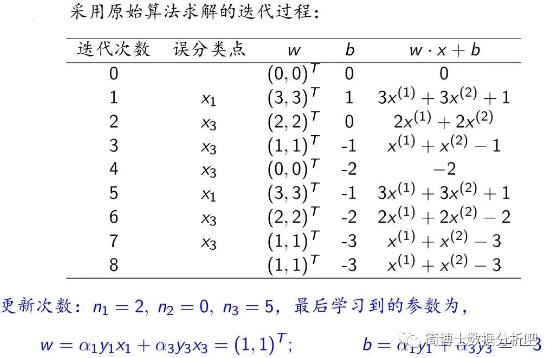
现在我们表述一下训练过程:
# 4. 感知机算法 - 对偶形式
# 4.1 算法介绍
在之前讲解的原始形式的学习算法中,如果实例点
假如,每一个实例点对于参数更新做了
我们用一个例子来解释:
在这个过程中,实例
对偶形式,基本思想就是通过实例点的线性组合来更新参数,其权重由贡献的大小决定。
以下是对偶形式的具体步骤:
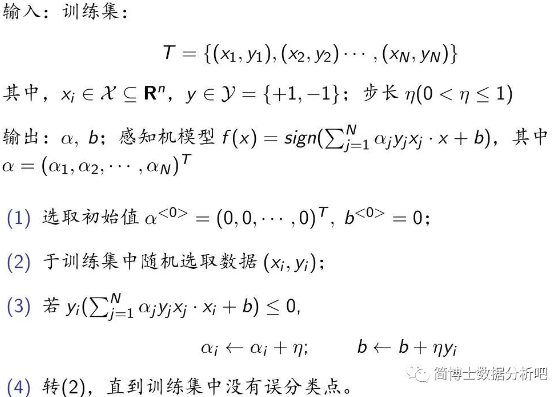
可以看到,与原始形式相比,对偶形式的算法在更新步骤中更新的是
与原始形式相比,对偶形式有什么优势呢?这需要,仔细分析对偶形式的迭代条件:
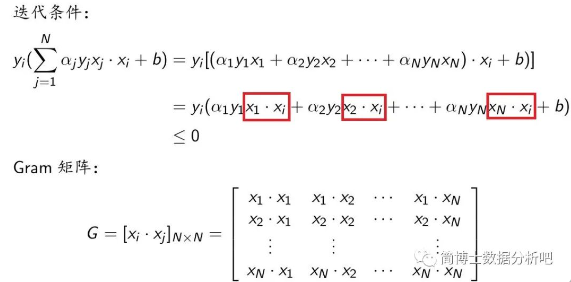
将迭代条件展开,我们发现,如果训练数据集固定,那么有些值是不需要重复计算的,也就是我们红框里的这 N 个内积。在有了 Gram 矩阵后,如果
我们要做的,就是在得到训练数据集之后,把这
# 4.2 例题解说
例题如下:
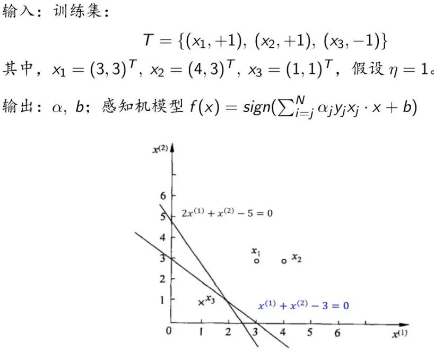
我们看看用对偶算法怎么找到分离超平面:
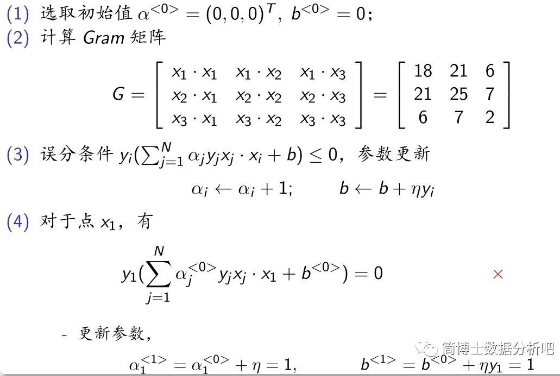
先设置初始值,不妨还是取零向量,然后计算 Gram 矩阵,把 9 个内积的值都储存下来。接下来就是判断误分类点,可以选取

可以计算出
注意每轮是更新
和 ,而不是像原始形式那样更新 和 。
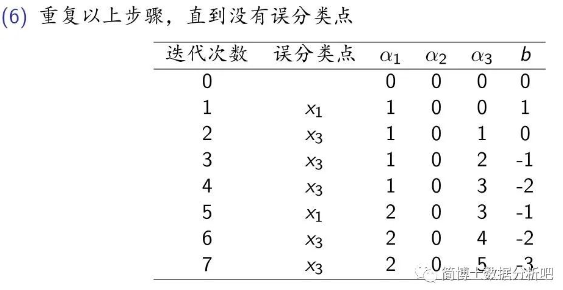
之后,重复步骤,直到没有误分类点,停止迭代,这样,就得到最终模型了。用之前更新后的
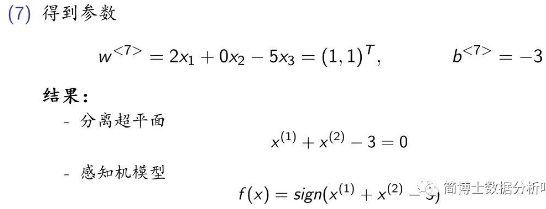
可以看出,无论是原始形式还是对偶形式,如果迭代的过程是一样的,最后得到的分离超平面还有感知机模型是相同的。同样的,类似于原始形式的学习算法,对偶形式的学习算法也是收敛的,而且存在多种解。如果要得到唯一解,需要加约束条件,这就是支持向量机中的内容了。
# 5. 算法的收敛性证明
// TODO